























2026DIVE机器人论坛暨MATE国际水下机器大赛近日在上海交通大学成功举办。本次大赛由上海交通大学自动化与感知学院主办,以工程实践探索智能本质,联动机器人赛事,汇聚了机器人领域的学者与科研团队开展学术交流。元客视界作为本次唯一指定动作捕捉系统供应商,携水下智能体训练系统首次公开亮相,成功为MATE水下机器人比赛提供了高精度运动数据支撑。

破解水池定位难题:从“有漂移、缺真值”到实时精准追踪
水下实验水池中,无论是机器人姿态控制还是模型性能验证,长期受困于定位不准,声学信号易受池壁反射干扰、惯性导航存在累积漂移、传统影像测量缺乏三维深度数据,水下智能体训练系统在本次大赛中完成了它的首秀,为参赛水下机器人提供了高精度的三维位置与姿态真值。

该系统基于自研FZMotion光学动作捕捉技术平台,可实现亚毫米级定位精度与高频采样率,能够捕捉机器人的微小位移与快速动态,毫秒级的端到端传输延迟,保证了实时闭环控制的响应速度。系统支持多目标同步追踪,并具备IP68级防水能力,可在最深50米的水下环境中稳定运行。此外,兼容ROS、MATLAB、Python等主流接口,可根据水质条件灵活切换主动或被动光学标记,在不同水体环境中均能可靠工作。
帮助数十支参赛队伍完成了精准的控制验证,实现了从“有漂移、缺真值”到“实时、精准、可靠”的技术跨越。
动捕系统的多元智能体应用场景
同期举行的2026DIVE机器人论坛上,元客视界解决方案总监邓少华带来了《基于空间计算的具身智能多场景解决方案》为主题的分享。通过多个实际案例展示了光学运动捕捉技术在多行异构智能体场景中的广泛适用性。

在水下与水面场景,水下智能体训练系统已用于无人艇、水下机器人的运动跟踪和形变测量,能够同步采集缩比平台在模拟风、浪、流耦合作用下的六自由度动态姿态数据,为水动力模型训练提供高精度真值。
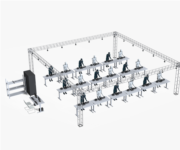
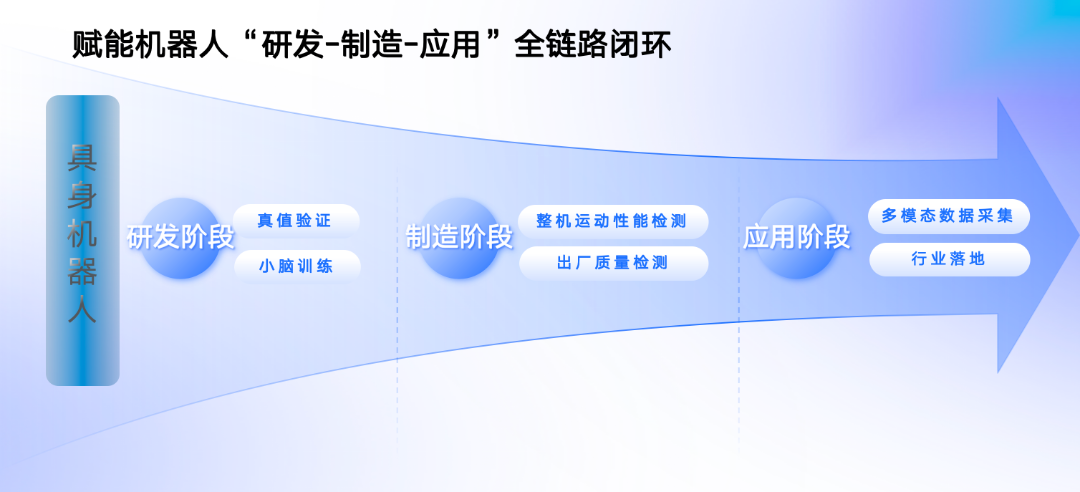
在人形机器人领域,从数据采集训练到量产检测,以“按场景选方案、全流程闭环”的一站式数据基座,成功服务于全生命周期的研发生产、工业机器人柔性化升级、科研教育等领域。
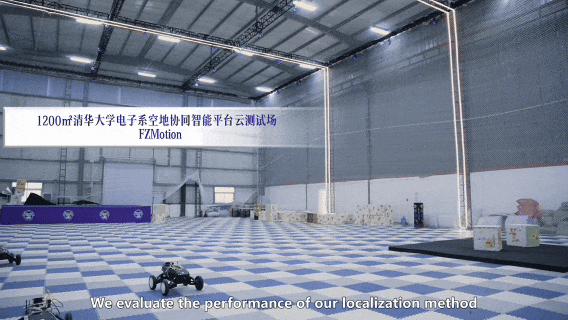
在多智能体协同方面,智能体协同训练系统支持轮腿式无人机、扑翼机器人、四足机器人、连续体机器人等异构平台的集群试验,可进行轨迹跟踪误差计算、模态切换稳定性分析与一致性验证。此外,该一站式数据基座已支撑建成北航、清华等上千平方米虚实融合实验室,支持从单机到集群的各类智能体研发与测试。

空间计算正在成为具身智能从实验室走向实际应用的关键基础设施。高精度动捕技术与数字孪生相结合,可有效降低研发门槛、缩短迭代周期,助力智能体在真实物理世界中实现稳健运行。
不止于水下,而是多元场景的赋能
水下智能体训练系统在本次大赛中顺利完成首秀,以高精度定位与实时获取数据验证能力,为参赛队伍提供了可靠的技术支撑,验证了其实用价值。
元客视界依然在探索更广阔领域的应用图景,正成为多智能体研发生产中的通用基础设施,同时以空间智能技术为核心,面向汽车、航空、军工、体育娱乐等领域提供全链路解决方案,真正服务于行业从实验室走向真实世界的多元场景。








